[선형대수학] 3강. 수학적 벡터 (벡터공간)
🙅♂️휴대폰으로 볼 때 혹시 글자나 숫자가 화면에 다 안나오면, 휴대폰 가로로 돌리시면 됩니다
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
*참고
1. 행렬과 선형변환 & 여러 선형변환의 시각적 예시
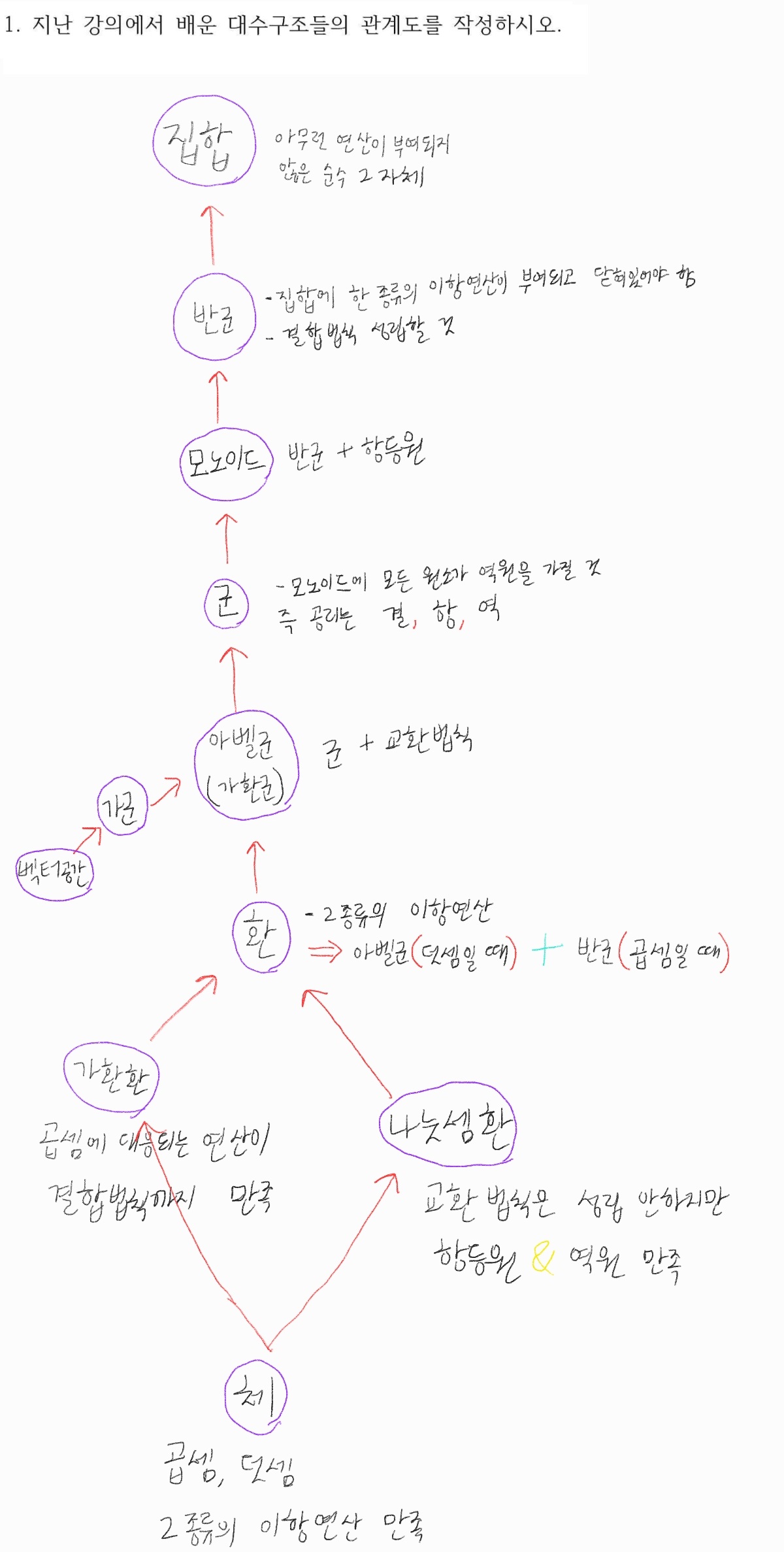
2. 대수구조
2-1 대수구조
2-2 여러 대수구조
3. 벡터공간
3-1 벡터공간
3-2 종류 (norm, 내적, 유클리드)
3-3 선형결합(linear combination) & 선형생성(span)
3-4 선형독립 & 선형종속
3-5 기저
3-6 차원
4. Rank와 Nullity
5. 이벤트문제(2개) + 예제(5개)
5-1 row space R(U), column space C(U), null space N(U) 구하기
5-2 dim 응용
5-3 예제 5개
*참고
시작하기 전 알면 좋은 것
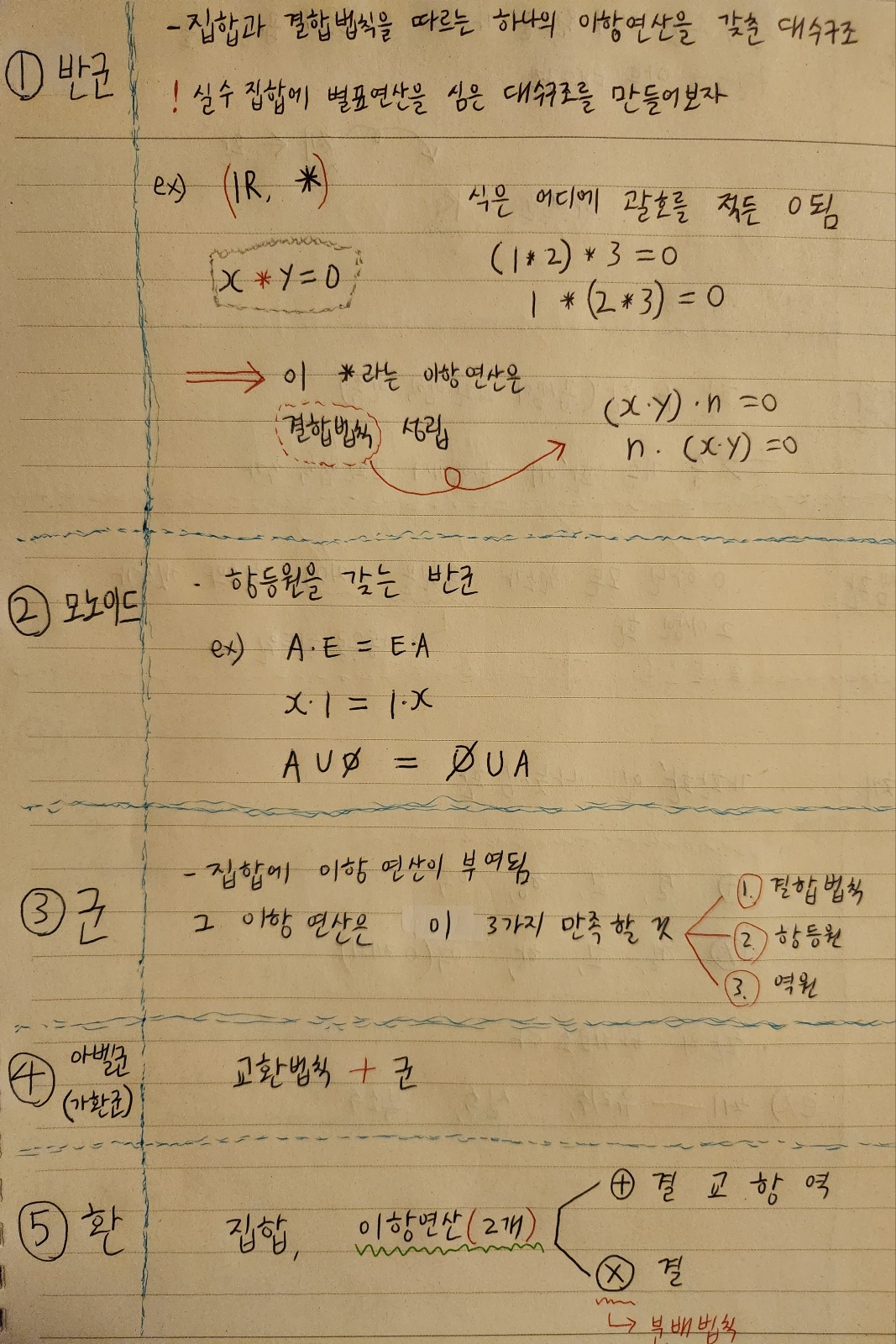
- 항등원:
- 덧셈 연산에서 항등원은 0이다: a+0=a (모든 a에 대해)
- 곱셈 연산에서 항등원은 1이다: a⋅1=a (모든 a에 대해)
- 역원
- 덧셈의 경우: 원소 a의 역원을 a′라 할 때, a+a′=0
- 곱셈의 경우: 원소 a의 역원을 a′라 할 때, a⋅a′=1
- 복습
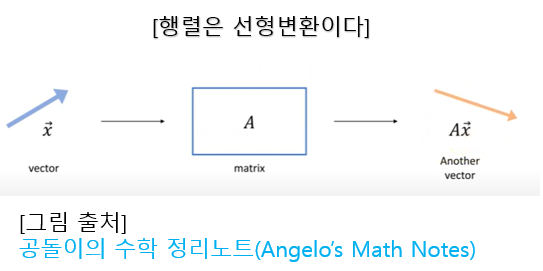
1. 행렬과 선형변환 & 여러 선형변환의 시각적 예시
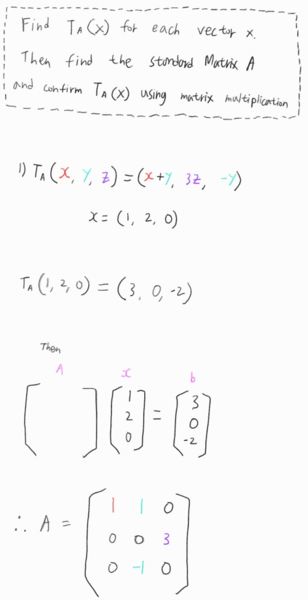
임의의 벡터 \(\vec{a}, \vec{b}\) 와 스칼라 c에 대해 변환 T가 다음의 두 조건을 만족한다면 이 변환 T는 선형변환이다
\(T(\vec{a}+\vec{b}) = T(\vec{a}) + T(\vec{b}) \\ T(c\vec{a}) = cT(\vec{a}\)
따라서 위의 선형 변환의 성질에 따라, 임의의 벡터 \(\begin{bmatrix} x \\ y \end{bmatrix}\) 에 대해 다음이 성립한다.
\(T\begin{bmatrix} x \\ y \end{bmatrix} = T \left(x \begin{bmatrix} 1 \\ 0 \end{bmatrix} + y \begin{bmatrix} 0 \\ 1 \end{bmatrix}\right) = xT \left(\begin{bmatrix} 1 \\ 0 \end{bmatrix} \right) + yT \left(\begin{bmatrix} 0 \\ 1 \end{bmatrix} \right)\)
자 그러면
\(R^2\) 에서 기존 기저벡터를 \(\hat{i} = \begin{bmatrix} 1 \\ 0 \end{bmatrix} \quad\quad \hat{j} = \begin{bmatrix} 0 \\ 1 \end{bmatrix}\) 그리고 새로운 기저벡터를 \(\hat{i}_{new} \quad\quad \hat{j}_{new}\) 라 했을 때, \(\hat{i}_{new} = T\begin{bmatrix} 1 \\ 0 \end{bmatrix} \quad\quad \hat{j}_{new} = T\begin{bmatrix} 0 \\ 1 \end{bmatrix}\)
T가 선형변환이라면, 벡터 \(\begin{bmatrix} x \\ y \end{bmatrix}\) 는 선형변환 후에,
새로운 기저벡터 \(\hat{i}_{new}\) 와 \(\hat{j}_{new}\) 의 x배와 y배의 합으로 표현되야 한다는 것이다
예를들어 \(A= \begin{bmatrix} 2 & -3 \\ 1 & 1 \end{bmatrix}\)을 이용해 벡터 \(\vec{x} = \begin{bmatrix} 1 \\ 1 \end{bmatrix}\)을 변환시켜 보면,
\(A\vec{x}= \begin{bmatrix} 2 & -3 \\ 1 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} -1 \\ 2 \end{bmatrix}\) 임을 알 수 있는데
아래의 슬라이드를 움직이면 사진처럼 이 값은 새로운 두 기저벡터의 1배와 1배의 합으로 표현된다
그리고 슬라이드를 끝까지 움직여도 원점은 꼭짓점에 고정, 직선의 형태를 유지한게 보일것이다
–> 즉 transformation(선형변환)
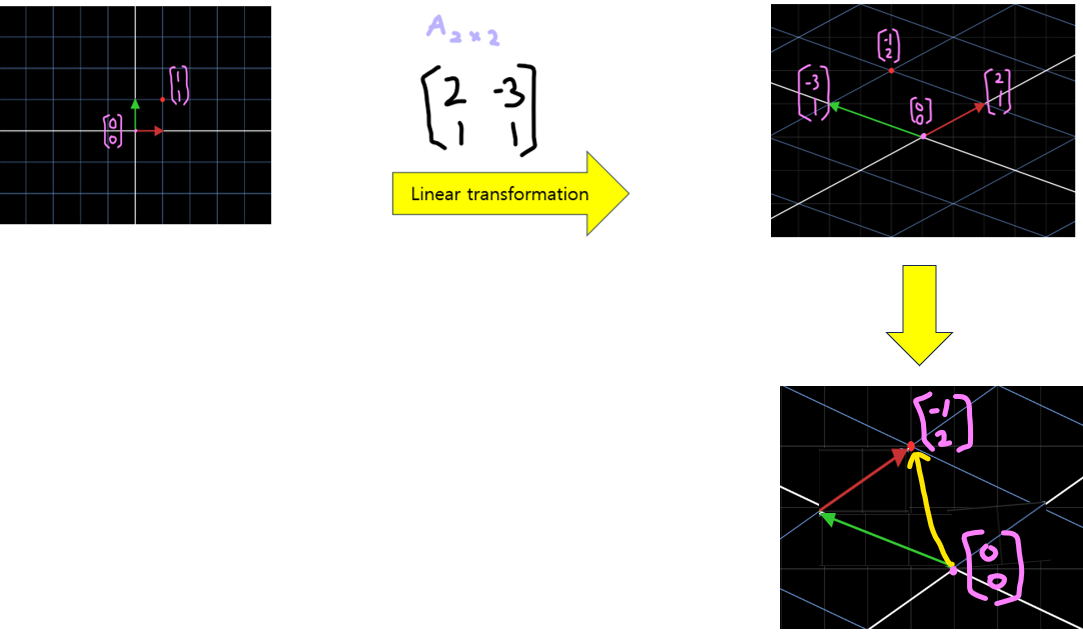
우선 좌측 사진은 선형변환 전, 우측사진은 A행렬로 선형변환을 한 후
여기서 초록색은 기저벡터인 i, 그리고 빨간색은 기저벡터인 j
빨간색 좌표인 1,1은 입력 벡터다
이를 보면 linear transformation 결과로 빨간점의 원래 기저벡터의 -1, 2배로 표현되었지만,
linear transformation(선형변환) 이후 새로운 기저벡터 \(\hat{i}_{new} \quad\quad \hat{j}_{new}\) 에 대해서는 각각 1, 1배로 표현되는 것을 알 수 있다.
즉 일반적으로, 선형대수학의 기본정리에 따르면 벡터공간의 선형변환 = 행렬의 본질
😎여러 선형변환의 시각적 예시
위의 시뮬레이션 및 그림에서 눈여겨 볼 점으로 선형 변환을 기하학적으로 표현하자면, 격자들이 변환 후에도 선의 형태이고, 격자 간의 간격도 균등하게 넓어야 한다는 것이다.
여러가지 선형 변환(즉, 행렬)을 기하학적으로 시각화 하였으니,
격자들이 변환 후에도 선의 형태를 유지하면서도, 격자 간의 간격이 균등하게 넓은지 확인해보자
아래의 5개 특징들은 행렬과 \(\vec{x}\)라는 벡터인 \(\begin{bmatrix} 1 \\ 1 \end{bmatrix}\)을 곱해 선형변환하는 각각의 시뮬레이션과 결과들이다
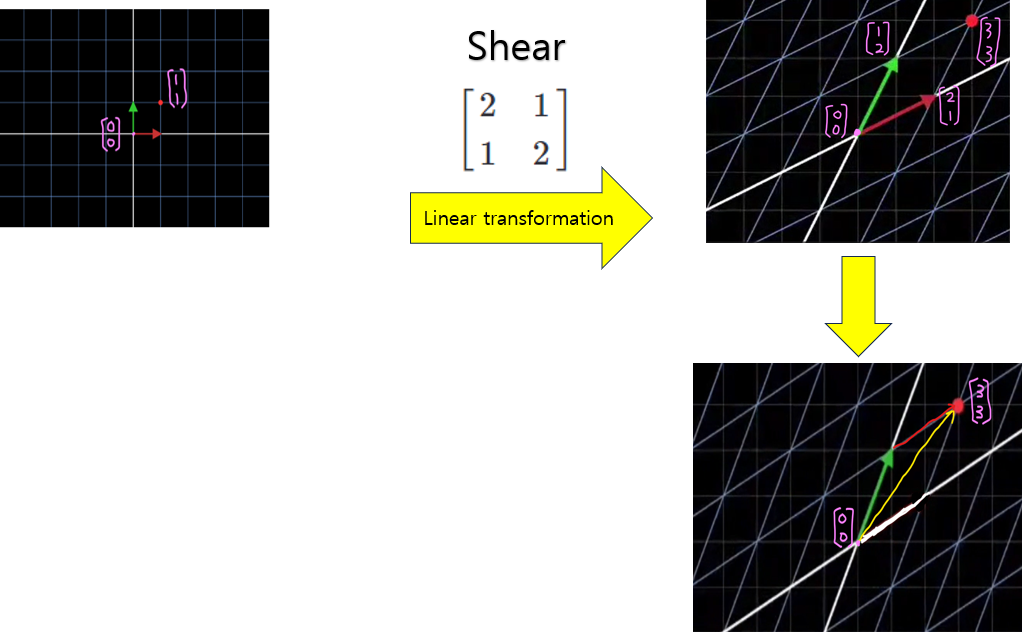
shearing
전단 or 전단변환이라고 하며, 원래의 사각형이 평행사변형이 되는 등의 변환을 보인다
\(\quad\quad\quad\quad\quad\quad \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix}\)

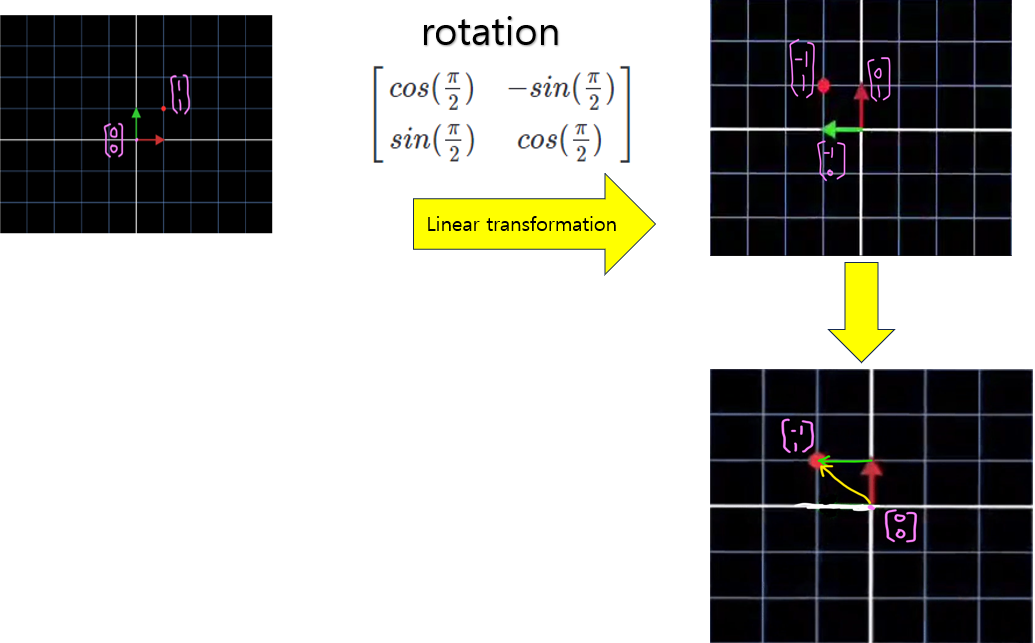
rotation
\(\quad\quad\quad\quad\quad\quad \begin{bmatrix} cos(\frac{\pi}{2}) & -sin(\frac{\pi}{2}) \\ sin(\frac{\pi}{2}) & cos(\frac{\pi}{2}) \end{bmatrix} =\begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix}\)

permutation
행렬의 행 or 열 순서를 변경하여 새로운 배열을 생성하는 것
\(\quad\quad\quad\quad\quad\quad \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix}\)
이 행렬에서는 행, 열 순서 바꿔도 다 똑같이 나온다

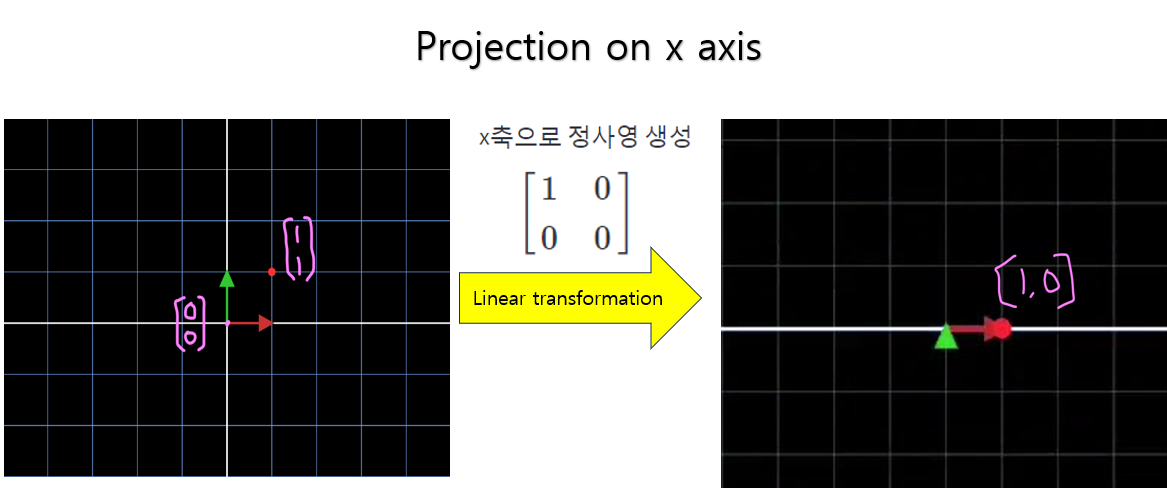
projection on x axis
x축으로 projection(정사영) 생성
\(\quad\quad\quad\quad\quad\quad \begin{bmatrix} 1 & 0 \\ 0 & 0 \end{bmatrix}\)

projection on a vector\(\begin{bmatrix} 1 \\ 2 \end{bmatrix}\)
\(\quad\quad\quad\quad\quad\quad \begin{bmatrix} 1 & 2 \\ 2 & 4 \end{bmatrix}\)

2. 대수구조
- 참고
우선 대수학부터 알아야 할 것입니다
대수학 —> 대수구조를 연구하는 학문
2-1 대수구조
간단하게 숫자를 대신한다는 말입니다
즉 숫자를 대신할 모든 대상으로 하는 집합 + 그 집합에 부여된 연산구조(structure)
ex) 일련의 연산들이 주어진 집합 –> ‘x’라는 문자가 1 대신, ㄱ이라는 문자가 8**2 대신 가능 즉 우리가 정하기에 따라 어떤 것들도 수학적 대상이 될 수 있습니다
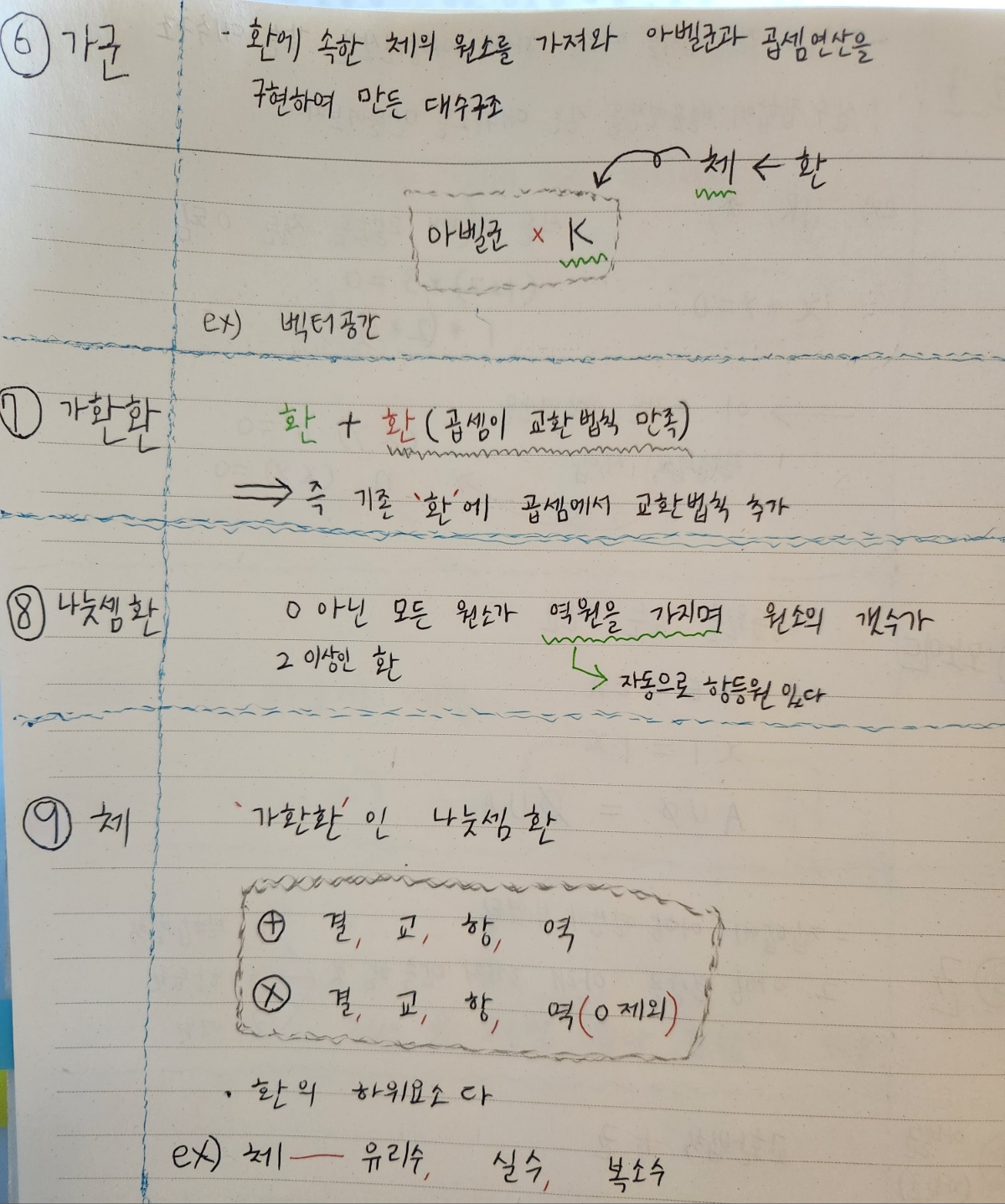
2-2 여러 대수구조
3. 벡터공간
3-1 벡터공간
벡터 공간을 이해하기 위해선 우선 공간을 알아야 합니다.
집합 V의 임의의 원소 u, v와 임의의 스칼라 k에 대하여
1) \(u+v \in V\)
2) \(ku \in V\)
이 2가지 성질을 만족할 때 집합(Set) V를 공간(Space) V라고 합니다.
그렇다면 벡터공간은?
공간 V의 임의의 원소 u, v, w와 임의의 스칼라 k, l에 대해 다음이 모두 만족되고,
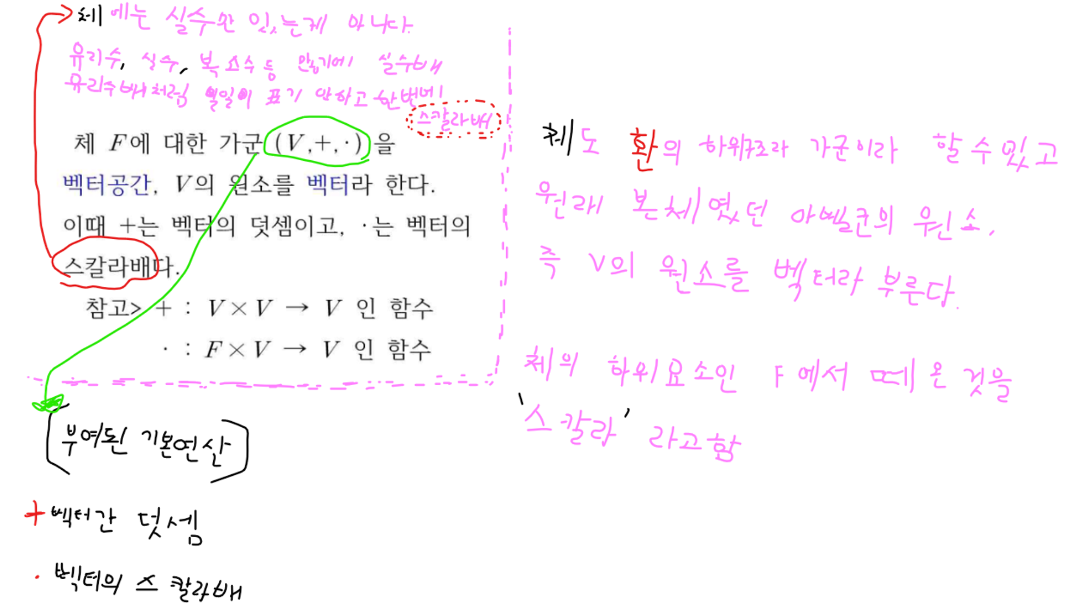
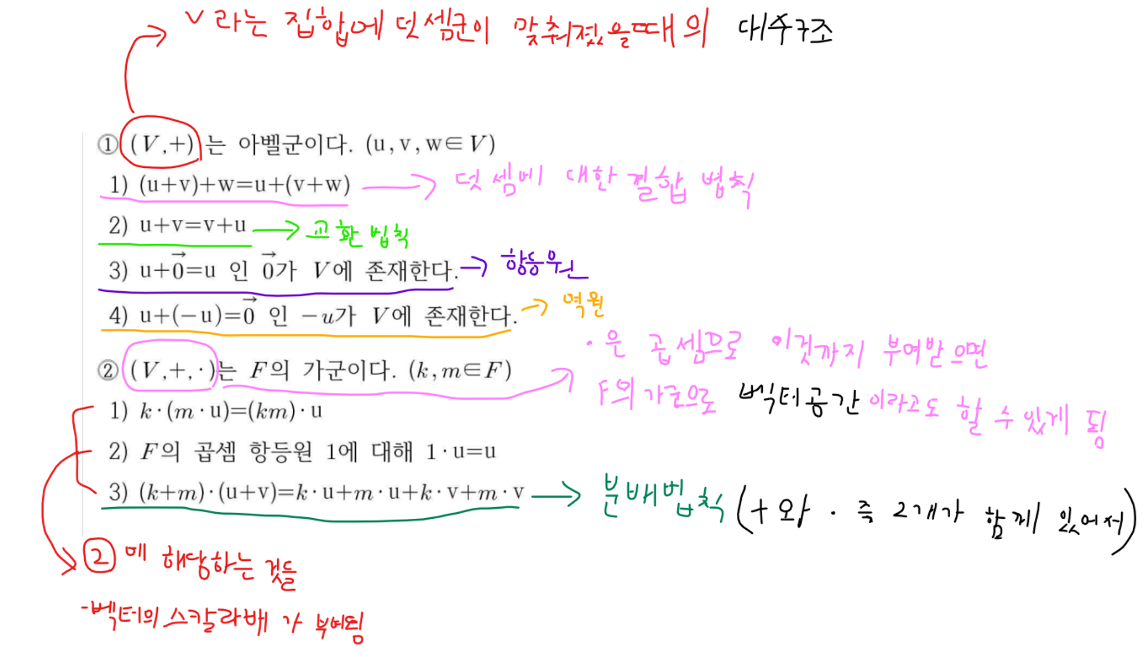
아래의 성질 8개를 모두 만족할 때 공간 V를 벡터공간(Vector Space) V 라고 한다
1) \(u+v = v+u\)
2) \((u+v) + w = u + (v+w)\)
3) \(u + 0 = u\)
4) \(u + (-u) = 0\)
5) \(k(u+v) = ku + kv\)
6) \((k+l)u = ku + lu\)
7) \((kl)u = k(lu) = l(ku)\)
8) \(lu = u\)
1
아래는 대수구조와 함께 성질 8개에 대한 내용입니다.
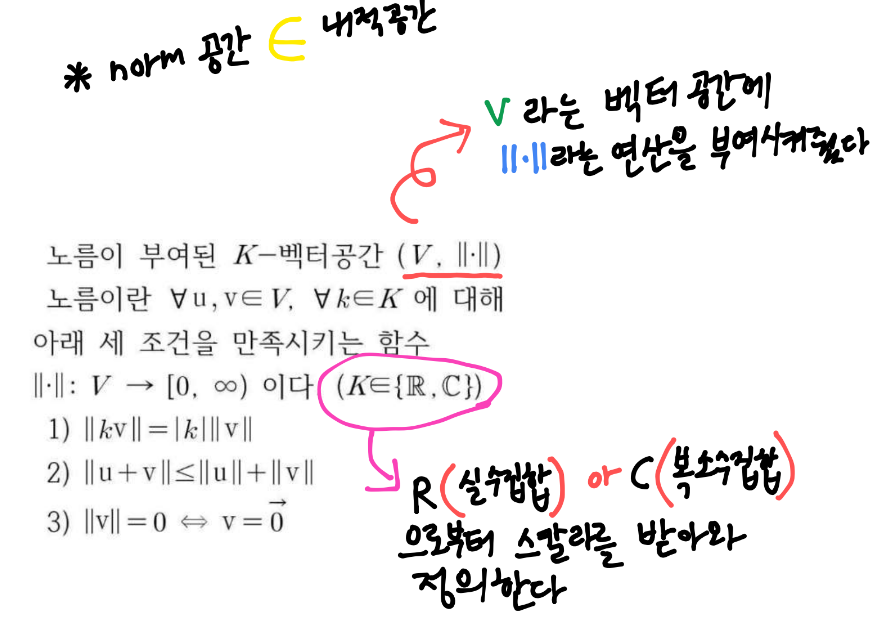
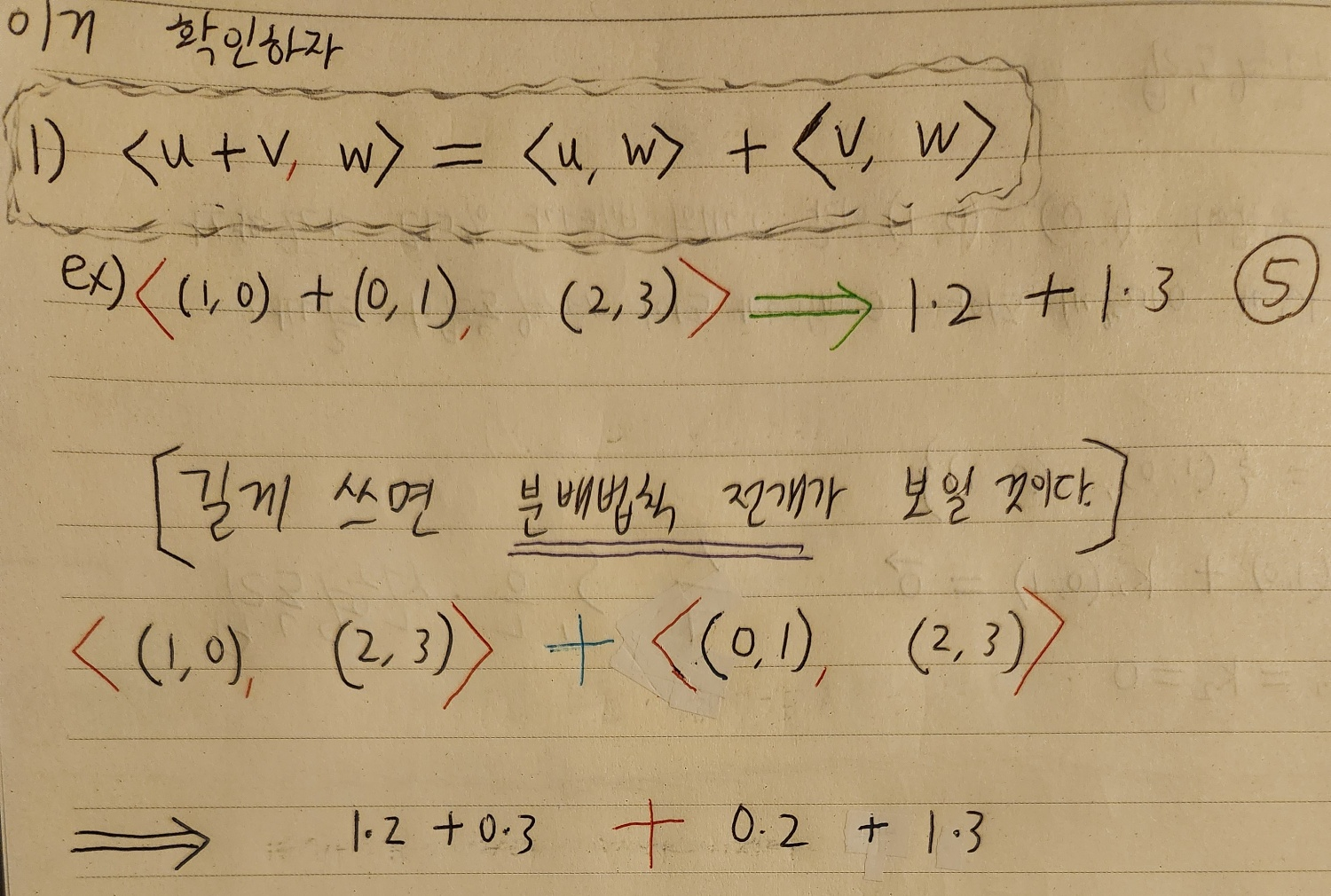
3-2 종류 (norm, 내적, 유클리드)
(1) Norm 공간
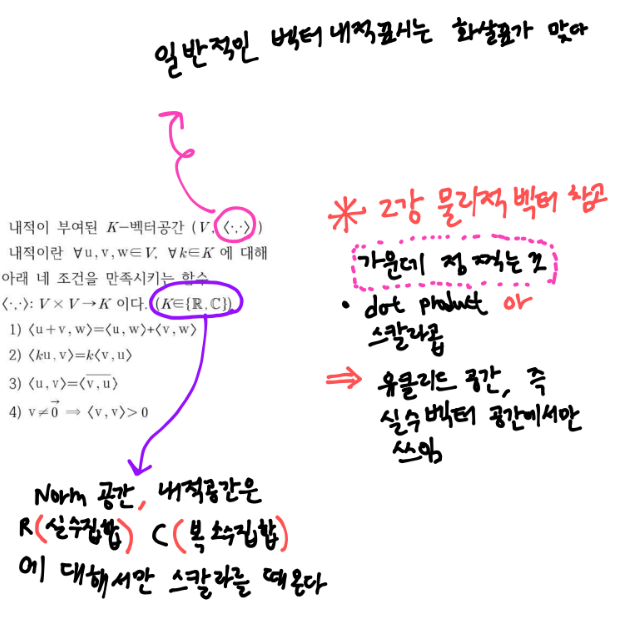
(2) 내적공간
(3) 유클리드 공간
3-3 선형결합(linear combination) & 선형생성(span)
(1) 선형결합(linear combination)
벡터 \(V\)가 벡터 \(v_1, v_2 \ldots, v_n\)의 linear combination
뜻:
\(V = c_1v_1 + c_2v_2 + \ldots, + c_nv_n\)을 만족하는
스칼라배가 가능한 실수 \(c_1, c_2 \ldots, c_n\)이 존재한다는 것입니다.
$ \color{red}{\Rightarrow} $ 쉽게 얘기하면 \(c_1v_1\), \(c_2v_2\) 라는 벡터들을 조합(combination)하여 V라는 새로운 벡터를 만든다는 겁니다
(더 쉽게 얘기하면 \(v_1\), \(v_2\)벡터들을 각각 얼마나(\(c_1\), \(c_2\)) 쓸까?) 이걸 식으로 나타내면 이렇습니다 \(V = c_1v_1+c_2v_2\)
예시로 벡터 \(V=\begin{bmatrix} 1 \\ 1 \\ 1 \end{bmatrix}\) 이라고 하면,
벡터 V는 \(\begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}\) + \(\begin{bmatrix} 0 \\ 1 \\ 1 \end{bmatrix}\) 이 두 벡터를 더한 linear combination이라고 할 수 있습니다.
그러면 \(V=\begin{bmatrix} 1 \\ 2 \\ 2 \end{bmatrix}\) 일때는
\(\begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}\) + \(2\begin{bmatrix} 0 \\ 1 \\ 1 \end{bmatrix}\) 이렇게 linear combination을 해주어 만들 수 있습니다
이건 linear combination이 불가능한 경우입니다.
\(V=\begin{bmatrix} 1 \\ 2 \\ 2 \end{bmatrix}\) 일때 \(V \neq \begin{bmatrix} 1 \\ 1 \\ 0 \end{bmatrix} + \begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}\)
왜? –> 맨 아래 원소 둘다 0이라 각각 상수배 하여 덧셈해줘도 2 못 만듦
😎시각화
자 쉬운 이해를 위해 시각화로 보겠습니다
우선 2차원에서 \(v_1\), \(v_2\) 벡터를 가지고 linear combination 하겠습니다
벡터를 더하려면?? $\Rightarrow$ \(\color{red}{\vec{v}_{2}}\)를 \(\color{lightblue}{\vec{v}_{1}}\) 끝점으로 옮겨라
\(\therefore\) 노란벡터(더한 결과)

그러면 이번에는 \(\color{lightblue}{\vec{v}_{1}}\), \(\color{red}{\vec{v}_{2}}\)에 각각 스칼라배를 바꾸어 선형결합한 결과를
노란색으로 나타내고, 선형결합했던 흔적을 회색으로 표현하겠습니다

(2) 선형생성(span)
span은 쉽게 선택한 벡터들로 생성된 공간인데,
주어진 벡터들의 선형 조합으로 생성되는 모든 벡터들의 집합입니다
😎시각화
쉽게 이해하기 위해 \(R^3\)에서 벡터2개와 벡터3개가 각각 span하는 모습을 보겠습니다.
벡터 2개로 span \(R^3\)에서 \(c_1\color{lightblue}{\vec{v}_{1}}\), \(c_2\color{pink}{\vec{v}_{2}}\)로 선형결합 결과인 \(\color{green}{\vec{V}}\)를 나타낸 것
\(\rightarrow\) 즉 \(R^3\)에서 2차원 평면공간 내에 모든 곳을 나타낼 수 있다 
벡터 3개로 span \(R^3\)에서 \(c_1\color{lightblue}{\vec{v}_{1}}\), \(c_2\color{pink}{\vec{v}_{2}}\), \(c_3\color{red}{\vec{v}_{3}}\)로 선형결합한 결과
\(\rightarrow\) 즉 \(R^3\)에서 3차원 평면공간 내에 모든 곳을 나타낼 수 있다

(3) 부분벡터 공간
벡터공간 V에 포함된 부분집합(subset) H가 벡터공간의 성질 8개를 만족할 때
부분공간(Subspace) or 부분벡터공간이라고 하며 W다.
우선 조건은 3가지로 아래와 같습니다.
1) \(zero \quad vector \quad 보유\)
2) \(\vec{v}+\vec{u} \in V\)
3) \(k\vec{v} \in V\)
\(R^3\)에 있다고 가정하고 우선 영벡터인 \(\vec{0} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix}\)이 있어야 합니다.
그리고 임의의 벡터 v+u를 더한게 V벡터공간에 속해야 하고,
스칼라배를 한 벡터도 V벡터공간에 속해야 합니다. 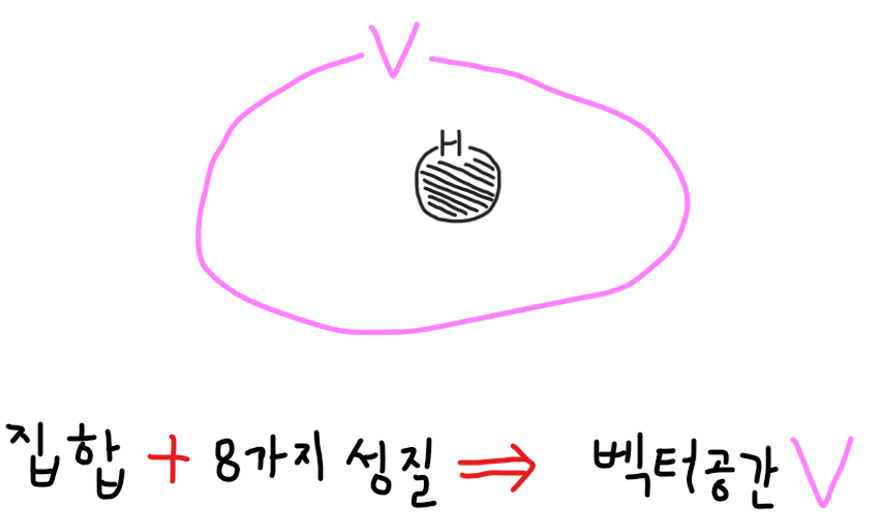
쉽게 얘기해서 크림빵이 있는데 떼어냈을 때, 크림이 없는 빵 부분이라면 그냥 빵인데
크림도 같이 묻은 빵이 떼어진다면 크림빵이라 할 수 있습니다.
즉 2번째는 크림빵의 성질을 만족합니다
3-4 선형독립 & 선형종속
우선 선형독립, 선형종속의 영상부터 먼저 보고 시작하겠습니다.
선형독립

선형종속

벡터방정식 \(c_1v_1 + c_2v_2 \quad ... \quad + c_nv_n = \vec{0}\) 에서
\(c_1, c_2\quad \ldots \quad, c_n = 0\) 이라면
$ \color{pink}{\Rightarrow} $ 해가 영벡터 뿐, 즉 선형독립
영벡터가 이외의 해가 존재
$ \color{lightblue}{\Rightarrow} $ 선형종속
쉽게 보기위해 각 벡터집합인 \(v_1, v_2\quad \ldots \quad, v_n\)을 전개해보겠습니다
아래는 선형독립과 종속에 대한 판별법입니다
\(v_1=\begin{bmatrix} 1 \\ 0 \\ 2 \end{bmatrix}, \quad v_2=\begin{bmatrix} -1 \\ 1 \\ 2 \end{bmatrix}, \quad v_3=\begin{bmatrix} -2 \\ 3 \\ 1 \end{bmatrix}, \quad v_4=\begin{bmatrix} 2 \\ 1 \\ 1 \end{bmatrix}\)
이렇게 4개의 벡터가 있다고 가정할 때
선형독립을 구하는 방법은
정말 쉽게 얘기해서 각각의 벡터에 k상수배를
곱하거나 안곱하여 더해줬을 때 그 중에 한 벡터의 값이 나오거나 0 이외의 해가 나오면 안됩니다
case 1) 한 벡터의 값이 나오는 경우
$ \color{red}{\Rightarrow} $ \(k_2v_2 +k_3v_3 + k_4v_4 = v_1\) 이렇게 표현되면 안된다는 얘기입니다
(즉 전부 독립적이어야 합니다 –> 그래야 선형독립입니다)
case 2) 0 이외의 해가 나오는 경우
쉽게 얘기해 0 이외의 스칼라가 존재하는 경우입니다
\(k_1\begin{bmatrix} 1 \\ 0 \end{bmatrix} + k_2\begin{bmatrix} 0 \\ 1 \end{bmatrix} + k_3\begin{bmatrix} 1 \\ 1 \end{bmatrix}= \vec{0}\) 이라면
\(k_1 = k_2 = 1\) \(k_3 = -1\)로 선형종속 입니다
처음부터 차근차근 보겠습니다
우선 \(v_1, v_2, v_3\) 만 비교해보겠습니다
\(c_1v_1 + c_2v_2 + c_3v_3 = \vec{0}\) $ \color{red}{\Rightarrow} $ \(c_1, c_2, c_3 = 0\)
이걸 식으로 고쳐보겠습니다
\(\begin{bmatrix}1 & -1 & -2 \\ 0 & 1 & 3 \\ 2 & 2 & 1 \end{bmatrix} \begin{bmatrix} c_1 \\ c_2 \\ c_3 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix}\)
현재 Ax = 0 형태인데 기약행 사다리꼴형태가 되는지 확인합니다
: \(A^-1\) 을 곱하여 \(I\)인 [(1,0,0)(0,1,0)(0,0,1)]를 확인
: 기약행 사다리꼴로 \(I\)가 되는지 확인
참고: (행렬 계산할 때는 각 행을 열로 전치시킴)
확인해보니 만들 수 있네요! 아래 참고⬇️
\(\begin{bmatrix}1 & 0 & 0 \\0 & 1 & 0 \\ 0 & 0 & 1\end{bmatrix}\)
위 3개 벡터들은 선형독립이니 아래처럼 휘어진 좌표계들로
3차원 전체를 나타낼 수 있습니다

즉 \(v_1, v_2, v_3\)으로 3차원 전체를 표현할 수 있어 \(v_4\)는 필요 없습니다
\(Span\{v_1, v_2, v_3\} = |R^3\) $ \color{red}{\Rightarrow} $ 그리하여 \(v_1,v_2,v_3,v_4\)는 선형독립이 아니고,
\(v_1,v_2,v_3\) 끼리만 선형독립입니다.
근데 \(v_1\)을 제외하고 \(v_2,v_3,v_4\) 이 3개만으로 선형독립이 안된다는 보장도 없습니다.
계산하면 \(Span\{v_2, v_3, v_4\} = |R^3\)
이렇게 3차원 전체를 나타낼 수도 있습니다
조금 더 예시를 살펴보면 아래와 같습니다.
1
2
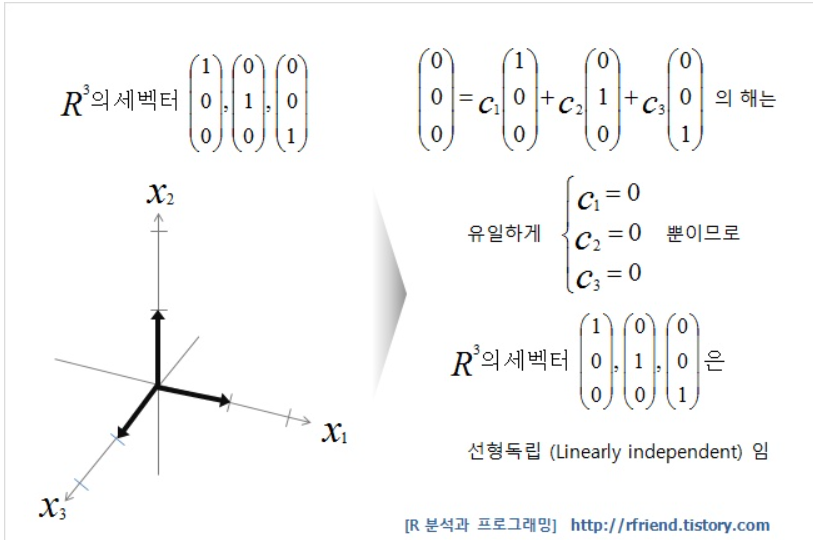
case 1)
$$R^3$$ 의 세 벡터 (1, 0, 0), (0, 1, 0), (0, 0, 1)은 선형독립이다
1
2
3
4
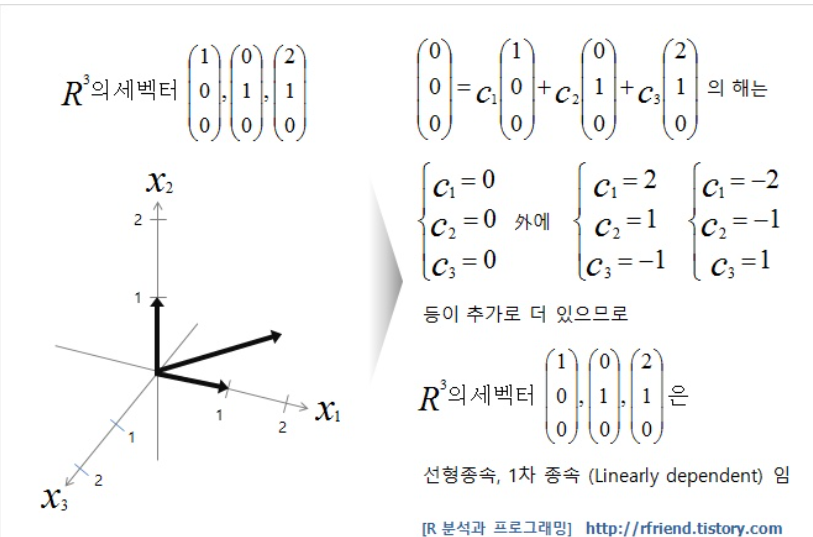
case 2)
$$R^3$$ 의 세 벡터 (1, 0, 0), (0, 1, 0), (2, 1, 0)은 선형종속이다
그래서 기저가 될 수없다. 왜냐하면 v_1인 (1,0,0)과 v(0,1,0)으로
v_3인 (2,1,0)을 나타낼 수 있기 때문이다
3-5 기저
기저(basis)란 특정 벡터 공간 안에서 그 공간을 형성하는 벡터들의 집합으로
\(R^n\)의 임의의 원소를 표현하기 위해 필요한 최소한의 벡터로 이루어진 집합입니다.
쉽게 생각하면 $ \color{red}{\Rightarrow} $기저벡터의 갯수 = \(R^n\)라는 차원에서의 n차원 평면도형을 표현 가능
ex) 각 벡터의 원소가 5개인 기저벡터가 3개라면 3차원 평면도형을 만들 수 있음
그래서 3차원의 기저가 [[1,0,0],[0,1,1],[0,0,1]] 일수도 있고,
[[1,1,0,0,0],[0,0,1,-1,0],[0,0,0,0,1]] 이렇게 형성될 수도 있다.
아래는 \(R^2\)을 기준으로 기저와 임의의 고유기저로 만든 (3,4)에 대해 확인한 내용입니다. 
표준기저: \(\{(1,0), (0,1)\}\)
기저: \(\{(1,1), (0,1)\} \\ \{(1,?), (0,1)\}\)
표준기저로는 \(\begin{bmatrix} 3 \\ 4 \end{bmatrix}=3\begin{bmatrix} 1 \\ 0 \end{bmatrix} + 4\begin{bmatrix} 0 \\ 1 \end{bmatrix}\) $ \color{red}{\Rightarrow} $ 좌표: \(\begin{bmatrix} 3 \\ 4 \end{bmatrix}\)
기저로는 \(\begin{bmatrix} 3 \\ 4 \end{bmatrix}=3\begin{bmatrix} 1 \\ 1 \end{bmatrix} + 1\begin{bmatrix} 0 \\ 1 \end{bmatrix}\) $ \color{red}{\Rightarrow} $ 좌표: \(\begin{bmatrix} 3 \\ 1 \end{bmatrix}\)
여기 있는 기저들로 (3, 4)를 나타낼 수 있습니다.
즉 여기 있는 \(R^2\) 차원(그래프)에 있는 원하는 원소(aka 벡터)들을 생성해낼 수 있을 때
우리는 그것들을 기저라고 부릅니다
3(1,1) + 1(0,1)
1
🙂기저의 원소 갯수는 정해져있지 않지만, 표준기저는 무조건 단위 행렬입니다.
ex) \(R^2\)에서 임의로 정한 기저 = \(\left\{\begin{bmatrix} 0 \\ 0 \\ 0 \\ 1 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 0 \\ 0 \\ 0 \\ 1 \end{bmatrix}\right\}\)
이 기저들로 2차원에서 2차원 평면을 표현할 수 있다
기저가 아닌 경우:
총 2가지를 예시로 들어보겠습니다
2차원의 임의의 원소를 표현하는데 2개의 벡터만 있으면 되는데, 아래는 4개므로 불필요한게 2개 더 있습니다. 그러므로 “m차원의 임의의 원소를 표현하기 위해 필요한 최소의 벡터로 이루어진 집합”인 기저(basis)가 아닙니다. 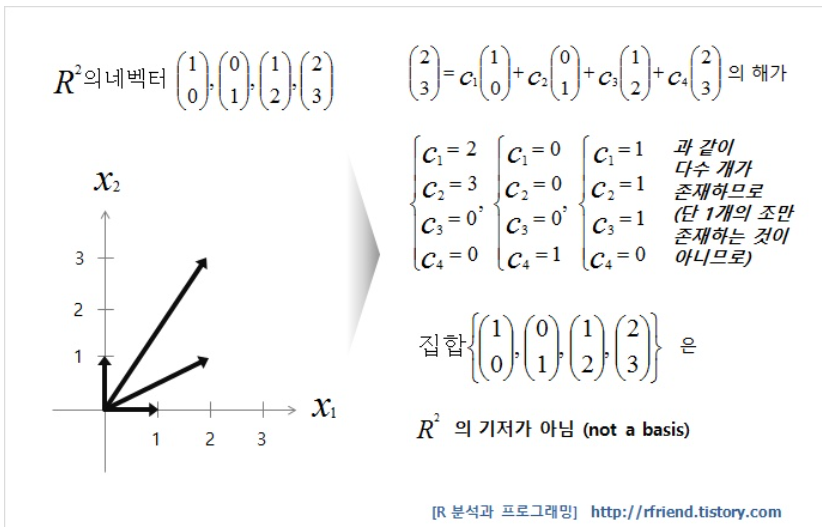
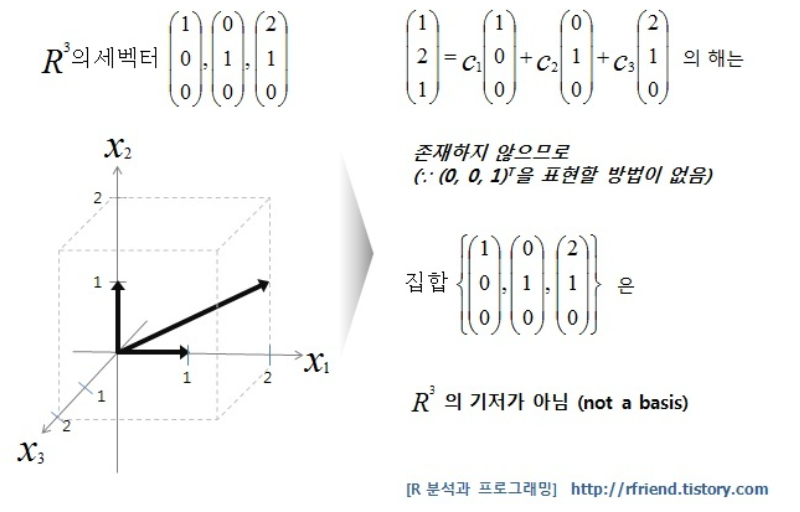
3차원의 임의의 원소를 표현하기 위해서 필요한 최소한의 벡터는 3개입니다
아래의 예는 이미 1번열, 2번열 벡터로 3번열 벡터를 표현할 수 있기에 3차원 기저에서 탈락입니다
게다가 3개 벡터의 세번째 원소가 모두 ‘0’으로 되어 있어서,
3차원의 세번째 차원을 표현할 방법이 없으므로 기저가 아닙니다. 기저X
그리고 0 이외의 해도 존재하여 선형종속
\(\begin{cases} c_1 = 0 \\ c_2 = 0 \\ c_3 = 0 \end{cases} ~ 이외에도 ~ \begin{cases} c_1 = 2 \\ c_2 = 1 \\ c_3 = -1 \end{cases} \begin{cases} c_1 = -2 \\ c_2 = -1 \\ c_3 = 1 \end{cases}\)
3-6 차원 (정말 중요!!)
일반적으로, n차원 벡터 공간은 n개의 독립적인 기저 벡터로 구성됩니다.
예를 들어 2차원 벡터 공간은 두 개의 독립적인 벡터로 구성되며,
3차원 벡터 공간은 세 개의 독립적인 벡터로 구성
또한 V의 차원을 dimV로 표시한다
특징:
기저는 변할 수 있지만 기저의 갯수는 변하지 않습니다!
차원의 갯수 = 기저
아까 말했지만 기저는 절대로 \(\vec{0}\)가 될 수 없습니다!
왜? –> 예를들어 \(R^3\) \(\vec{0}\)가 있다고하면 \(\begin{bmatrix} 0 \\ 0 \\0 \end{bmatrix}\)으로 선형종속성을 가지기 때문입니다.
즉 기저가 되려면 n차원을 전부 표현할 수 있어야 하고, 선형독립성이 있어야해서 \(\vec{0}\)이 되면 안됩니다
다음 벡터공간에 대해 차원을 구하면?
1
예제 1)
\(V = \{(a,b,c,d) \quad | \quad a=b=c\}\)
a, b, c가 같으니까 1로 고정시켰는데 d가 없네요
이게 뭐냐면 d는 혼자 움직일 수 있는 축에서 따로 놀고 있다는 뜻입니다.
즉 d는 0으로 채워지고 또 따로 하나 (0, 0, 0, 1)로 잡아줘야 합니다
즉 답은 아래와 같습니다.
$ \color{red}{\Rightarrow} $(1, 1, 1, 0), (0, 0, 0, 1)
즉 dim(V)=2로 기저 2개
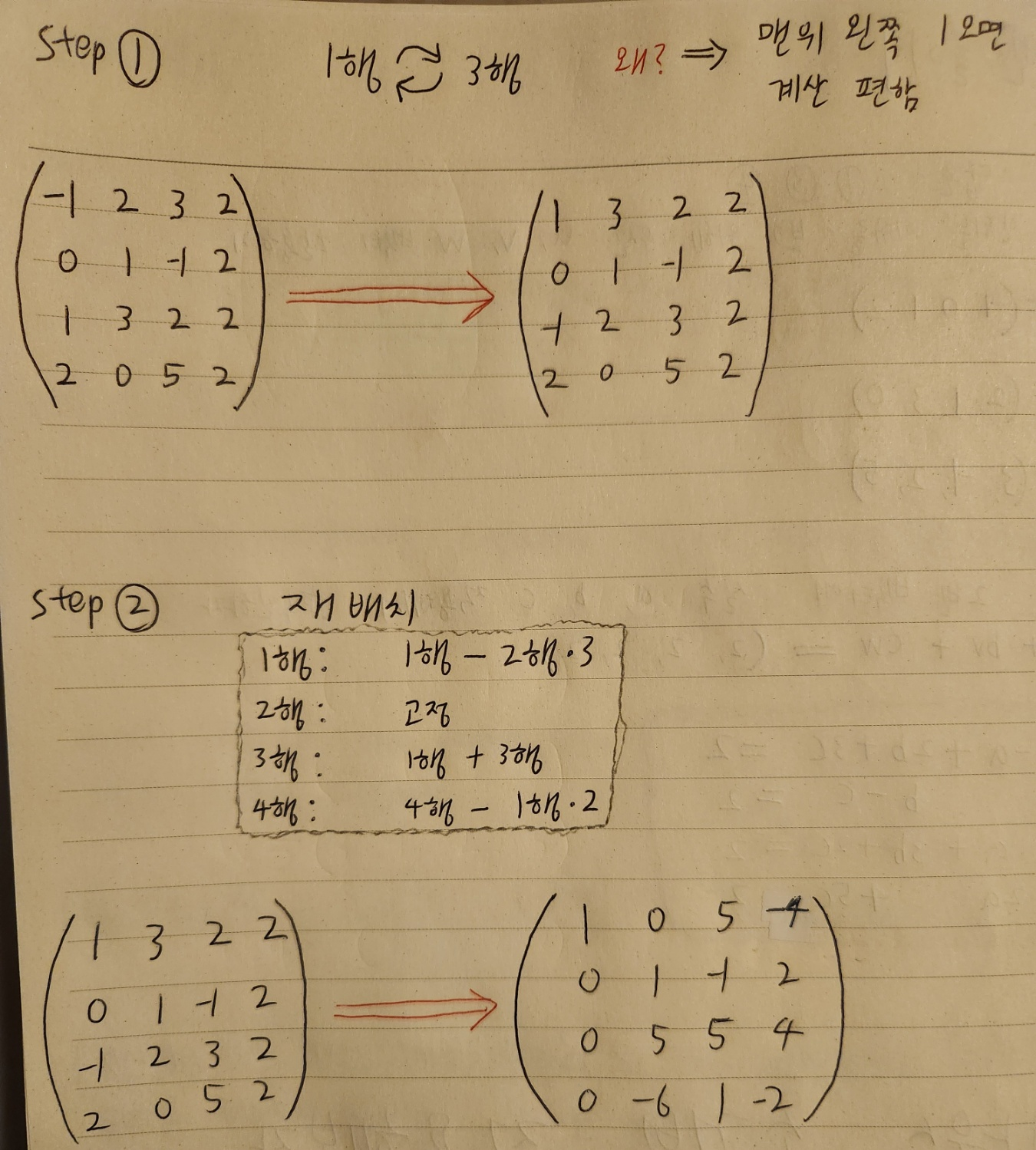
만약 저 기저로 (2, 2, 2, 5)를 만드려면 어떻게 해야할까요?
\((2, 2, 2, 5) = 2(1,1,1,0) + 5(0,0,0,1)\) $ \color{red}{\Rightarrow} $ 좌표: \(\begin{bmatrix} 2 \\ 5 \end{bmatrix}\)
1
예제 2)
\(V = \{(a,b,c,d,e) \quad | \quad a=b, c=-d \}\)
case 1)
a가 1로 고정되면 b도 똑같이 된다는 뜻입니다!
c, d는 0으로 따로 잡아줍시다 why? –> a,b랑 별개라서
e는 혼자 놀고 있으니 따로 0으로 잡읍시다!
case 2)
a, b를 0으로 고정
c, d는 그러면 1로 고정
e는 역시 혼자 놀기에 그대로 0
sol:
이렇게 되면 case 1, 2와 함께 혼자만 움직일 수 있는 e를 위한 축도 따로 잡아줍니다
$ \color{red}{\Rightarrow} $ (1,1,0,0,0), (0,0,1,-1,0), (0,0,0,0,1)
기저는 총 3개라서 3차원이 됩니다! dim(V) = 3
1
예제 3)
\(V = \{(a,b,c,d,e) \quad | \quad a=b=c=0 \}\)
{(0,0,0,1,0), (0,0,0,0,1)} 로 총 기저는 2개며 \(R^2\)입니다
1
예제 4)
\(W = \begin{cases}\begin{pmatrix}x_1 \\x_2 \\x_3\end{pmatrix}\end{cases} \in R^3 \quad | \quad x_1 + 2x_3 = 0, \quad x_2 - x_3 = 0\)
문제를 보니 \(x_1\)이 1이면, \(x_3\)은 \(-\frac{1}{2}\)되고, \(x_2\)는 \(\frac{1}{2}\)가 됩니다.
$ \color{red}{\Rightarrow} $ 즉 기저는 1개로 \(\{(1, -\frac{1}{2},-\frac{1}{2}) \}\) 가 되어 1차원 입니다
4. Rank와 Nullity
rank를 들어가기 전 잠깐 개념 복습 하겠습니다.
아래는 rank의 연산법인 연립일차행렬방정식에 대한 간단한 예시입니다!
아래 식으로 행렬을 AX = B 꼴로 고쳤습니다
A = 계수행렬, X = 변수를 포함한 열벡터 B = 상수벡터
초기 형태는 아래와 같습니다
\(\begin{bmatrix} 2 & -1 \\ 1 & 1 \end{bmatrix}\begin{bmatrix} x \\ y \end{bmatrix}=\begin{bmatrix} 4 \\ -1 \end{bmatrix}\)
\(\begin{cases}2x-y = -1 \\x+y = 4\end{cases}\) $ \color{red}{\Rightarrow} $ \(\begin{cases}x+y = 4 \\2x-y = -1 \end{cases}\) $ \color{red}{\Rightarrow} $ \(\begin{cases}2x+2y = 8 \\2x-y = -1 \end{cases}\) $ \color{red}{\Rightarrow} $ \(\begin{cases}2x+2y = 8 \\n0-3y = -9 \end{cases}\)
$ \color{red}{\Rightarrow} $ \(\begin{cases}x+y = 4 \\\quad\quad y = 3 \end{cases}\)
\(\begin{equation}\begin{pmatrix} 2 & -1 & | -1\\ 1 & 1 & |\quad 4\\ \end{pmatrix} \end{equation}\) $ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 1 & 1 & |\quad 4\\ 2 & -1 & | -1\\ \end{pmatrix} \end{equation}\)n$ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 2 & 2 & |\quad 8\\ 2 & -1 & | -1\\ \end{pmatrix} \end{equation}\) $ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 2 & 2 & |\quad 8\\ 0 & -3 & | -9\\ \end{pmatrix} \end{equation}\)
$ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 1 & 1 & | 4\\ 0 & 1 & | 3\\ \end{pmatrix} \end{equation}\)
우선 행 위치를 변경한 이유는 1번 행의 첫번째 자리에 1이 오면 계산하기 편합니다
이 문제에서는 1,2열까지 범위로 잡은 것을 계수행렬(coefficient matrix)이라하고
1,2,3열 범위를 다 잡은 것을 확대행렬(augmented matrix)이라고 합니다
Rank
이제 Rank의 개념부터 먼저 보겠습니다.
1
2
1. 임의의 행렬 A가 있을 때, 이 행렬A의 열들로 생성될 수 있는 벡터 공간의 차원
2. 행렬의 선형 독립성과 차원을 이해하는데 중추적인 역할
특성은 아래와 같습니다.
- rank의 연산은 연립방정식의 성질을 갖고 있습니다.
- rank연산 - row operation만 가능
📐 아주 중요
미지수가 n개인 연립일차방정식의 해와 계수(rank)의 관계
1
2
3
연립일차방정식의 계수행렬을 A, 확대행렬을 A|B라 하자
미지수(x,y,z 같은 것)의 갯수는 n --> 즉 계수행렬의 계수
1) rankA < rank(A|B)면 해가 존재하지 않는다
2) rankA = rank(A|B) = n 이면 해가 오직 하나만 존재
3) rankA = rank(A|B) < n 이면 무수히 많은 해를 가짐
<=> ex) \(R^3\)에서 (0,0,0)이외의 해를 가진다
💎매우 중요
rankA = coefficient matrix(계수행렬)의 범위에서 확인한 값,
rankA|B = augmented matrix(확대행렬) 범위에서 계산한 값
Rank 구하는 방법:
- 첫번째행의 선도원소는\(\neq 0\), 그리고 첫번째 열에 위치, 선도원소(pivot) 아래 전부 0
- 두번째행의 선도원소도 \(\neq 0\), 두번째 열에 위치, 선도원소(pivot) 아래 전부 0
- 다음행들도 동일 적용 (더이상 못할 때 까지)
- 최종적으로 각 행들이 전부 0이 아닌 것만 rank의 갯수로 가산
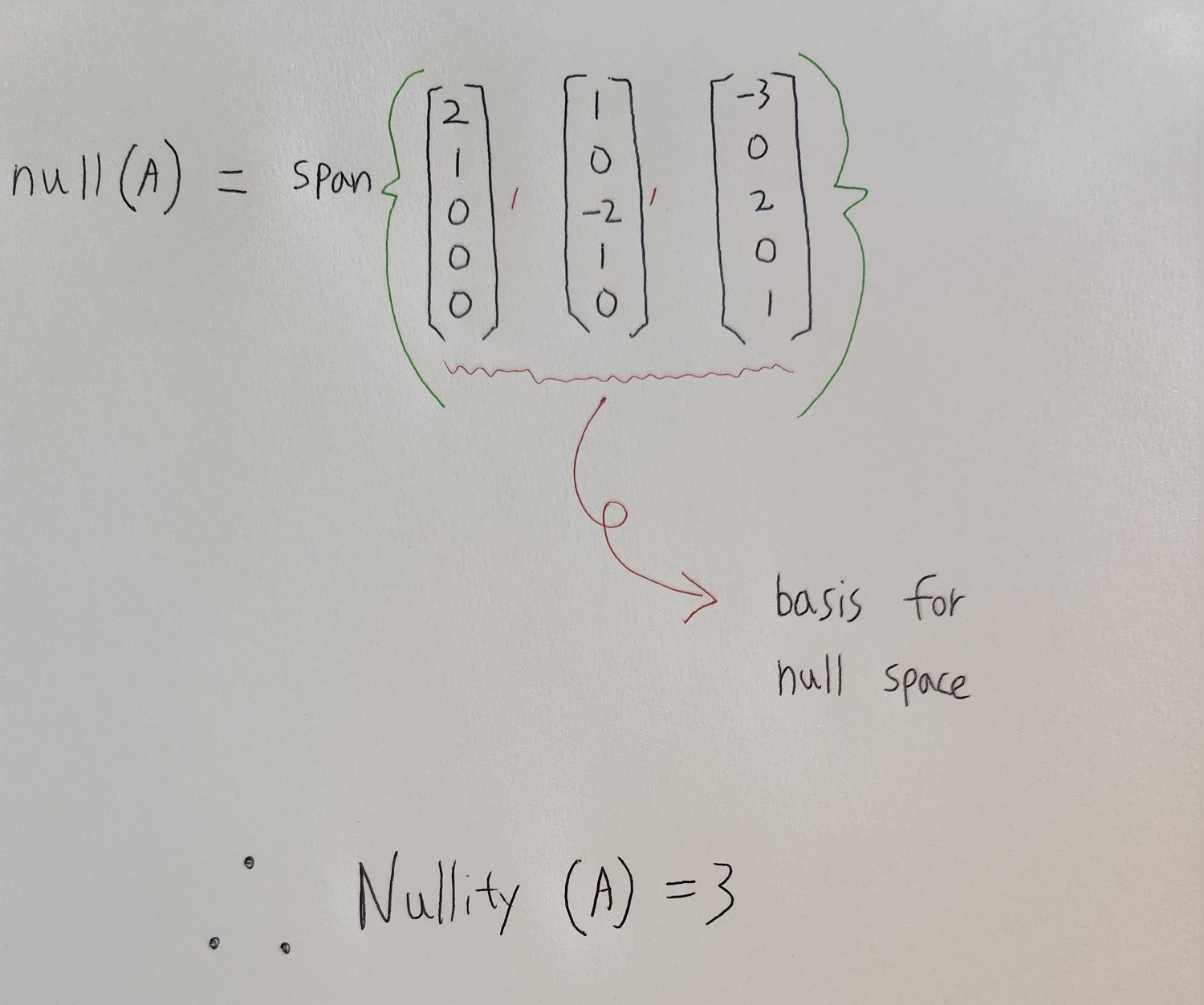
Nullity:
선형 변환에 의해 영벡터로 매핑되는 벡터의 차원입니다
예를들어 A행렬이 3x3행렬이면 행이 (0,0,0)인 것의 갯수입니다.
row = rank + Nullity
중요
Nullity를 알려면 Null space(영공간)를 구해야 합니다
AX=0에 대한 예시를 들겠습니다
아래는 3x5행렬 A입니다
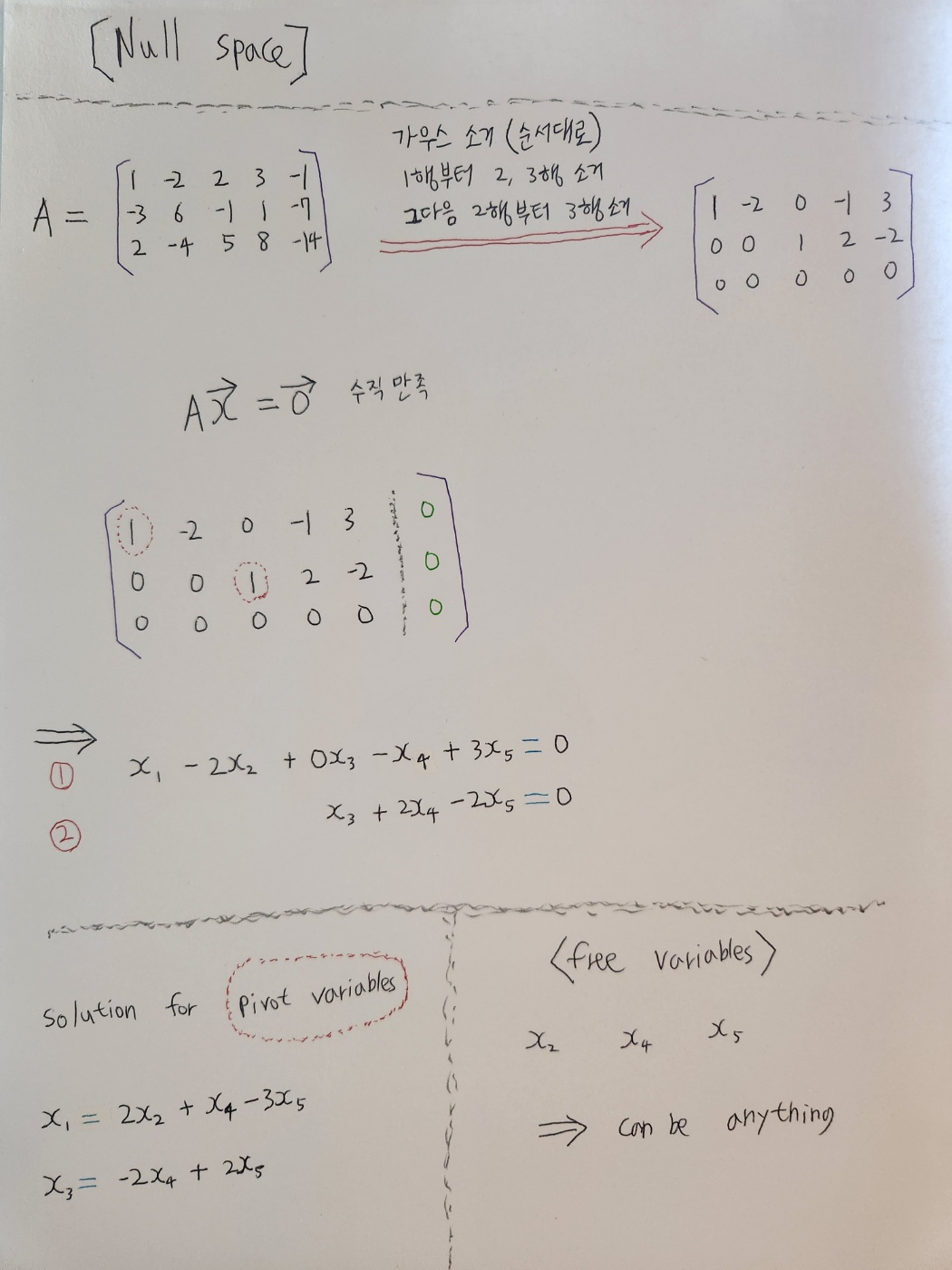
Rank와 Nullity 예시로 3개만 들겠습니다
1
예시 1)
\(\begin{equation}\begin{pmatrix} -1 & 0 & 5 \\ -3 & 7 & 0 \\0 & 2 & 1 \end{pmatrix} \end{equation}\) $ \color{red}{\Rightarrow} $ \(\ldots\) $ \color{red}{\Rightarrow}$ \(\begin{equation}\begin{pmatrix} -1 & 0 & 5 \\ 0 & 14 & -30 \\0 & 0 & 37\end{pmatrix} \end{equation}\)
계산해보면 rank 구하는 방법에 맞게 각 행들의 선도원소 아래는 zero가 되었고, 각 행들이 전부 0인 것은 없네요!
PivotColumn도 2개네요! (=선도 원소아래 zero)
free column은 3번째 열인 1개
$ \color{red}{\Rightarrow} $ 즉 rank = 3, nullity = 0, row = 3

여기서 초록색 선을 보시면 계단모양 같다고 하여 echelon form(사다리꼴 모양)라 합니다
1
예시 2)
\(\begin{equation}\begin{pmatrix} 1 & 4 & 2 \\ 3 & 1 & -5 \\-2 & 3 & 7 \\-7 & 5 & 19\end{pmatrix} \end{equation}\)$ \color{red}{\Rightarrow} $ \(\ldots\) $ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 1 & 4 & 2 \\ 0 & -11 & -11 \\0 & 11 & 11 \\0 & 33 & 33\end{pmatrix} \end{equation}\) \(\color{red}{\Rightarrow}\) \(\begin{equation}\begin{pmatrix} 1 & 4 & 2 \\ 0 & -11 & -11 \\0 & 0 & 0 \\ 0 & 0 & 0\end{pmatrix} \end{equation}\)
계산해보면 rank 구하는 방법에 맞게 1, 2행만 선도원소 아래가 zero가 되었고,
3번행부터는 선도원소가 없고 3, 4행은 zero행이네요!
$ \color{red}{\Rightarrow} $ 즉 rank = 2, nullity = 2, row = 4
1
예시 3)
일차연립방정식 \(\begin{equation}\begin{pmatrix} 1 & 2 & 1 & 0 \\ 2 & 5 & 5 & 1 \\-2 & -3 & 0 & 3 \\3 & 4 & -2 & -4\end{pmatrix} \end{equation}\) \(\begin{equation}\begin{pmatrix} x_1 \\ x_2 \\x_3 \\x_4\end{pmatrix} \end{equation}\) =\(\begin{equation}\begin{pmatrix} 0 \\ 0 \\0 \\1\end{pmatrix} \end{equation}\) 를 만족하는 실수해는?
\((1) 단 하나 존재 \\(2) 무한히 많이 존재 \\(3) 존재 안함 \\(4) 판정 불가\)
정석으로 풀어보면 아래처럼 순서대로 진행됩니다
1행 -> 2, 3, 4열 소거
2행 -> 3, 4열 소거
3행 -> 4열 소거
$ \color{red}{\Rightarrow} $ \(\begin{equation}\begin{pmatrix} 1 & 2 & 1 & 0 &|0\\ 0 & 1 & 3 & 1 & |0\\0 & 0 & -1 & 2 & |0\\0 & 0 & 0 & 0 & |1\end{pmatrix} \end{equation}\) 로 만들어 집니다
1~4열까지 rankA 구하는 구간
1~5열까지 rankA|B 구하는 구간
따라서 rankA = 3 rankA|B = 4
해가 존재하지 않아서 답은 (3)
5. 이벤트문제(2개) + 예제(5개)
5-1 row space R(U), column space C(U), null space N(U) 구하기
💎행공간, 열공간 잘 모르겠으면 여기 클릭
1
2
(ง˙∇˙)ว 이벤트 문제 1
(혹시 문제가 끊어져 보이면, 휴대폰을 가로로 돌리시면 보일겁니다!)
다음의 기약행 사다리꼴(reduced row-echelon form)행렬 U를 보자
\(U = \begin{equation}\begin{pmatrix} 1 & 0 & 0 & 2 & 2 \\ 0 & 1 & 0 & -1 & 3 \\0 & 0 & 1 & 4 & -1 \\0 & 0 & 0 & 0 & 0\end{pmatrix} \end{equation}\)
(1) row space R(U)
행 사다리꼴에서 제로행이 아닌 행들은 선형독립으로 마지막 제로행을 제외한
처음의 3개행들은 선형독립이다. 이들이 U의 행공간 R(U)를생성하고 R(U)의 basis가 된다
basis of R(U) = \({(1, 0, 0, 2, 2), (0, 1, 0, -1, 3), (0, 0, 1, 4, -1)}\\dim R(U) = 3\)
(2) column space C(U)
행 사다리꼴에서 선행 1(leading 1’s)을 포함하는 열들은 선형독립이다
나머지 4, 5열은 1,2,3 열의 선형결합으로 표현이 가능하다
그래서 처음 3개의 열벡터들이 U의 열공간 C(U)를 생성하고 이들이 C(U)의 basis basis of C(U) = \(\left\{\begin{bmatrix} 1 \\ 0 \\ 0 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 1 \\ 0 \\ 0 \end{bmatrix}, \begin{bmatrix} 0 \\ 0 \\ 1 \\ 0 \end{bmatrix}\right\}\\dim C(U) = 3\)
(3) Null space N(U)
영공간의 차원은 Nullity로 N(U)는 homogeneous equtation Ux = 0의 해집합이다
U가 free variables을 가지니 \(x_4, x_5\)가 무수히 많은 해를 갖는다
\(\begin{equation}\begin{pmatrix} 1 & 0 & 0 & 2 & 2 \\ 0 & 1 & 0 & -1 & 3 \\0 & 0 & 1 & 4 & -1 \\0 & 0 & 0 & 0 & 0\end{pmatrix} \end{equation} \begin{pmatrix} x_1 \\ x_2 \\x_3 \\x_4 \\x_5\end{pmatrix} =\begin{pmatrix} 0 \\ 0 \\0 \\0 \\0\end{pmatrix}\)
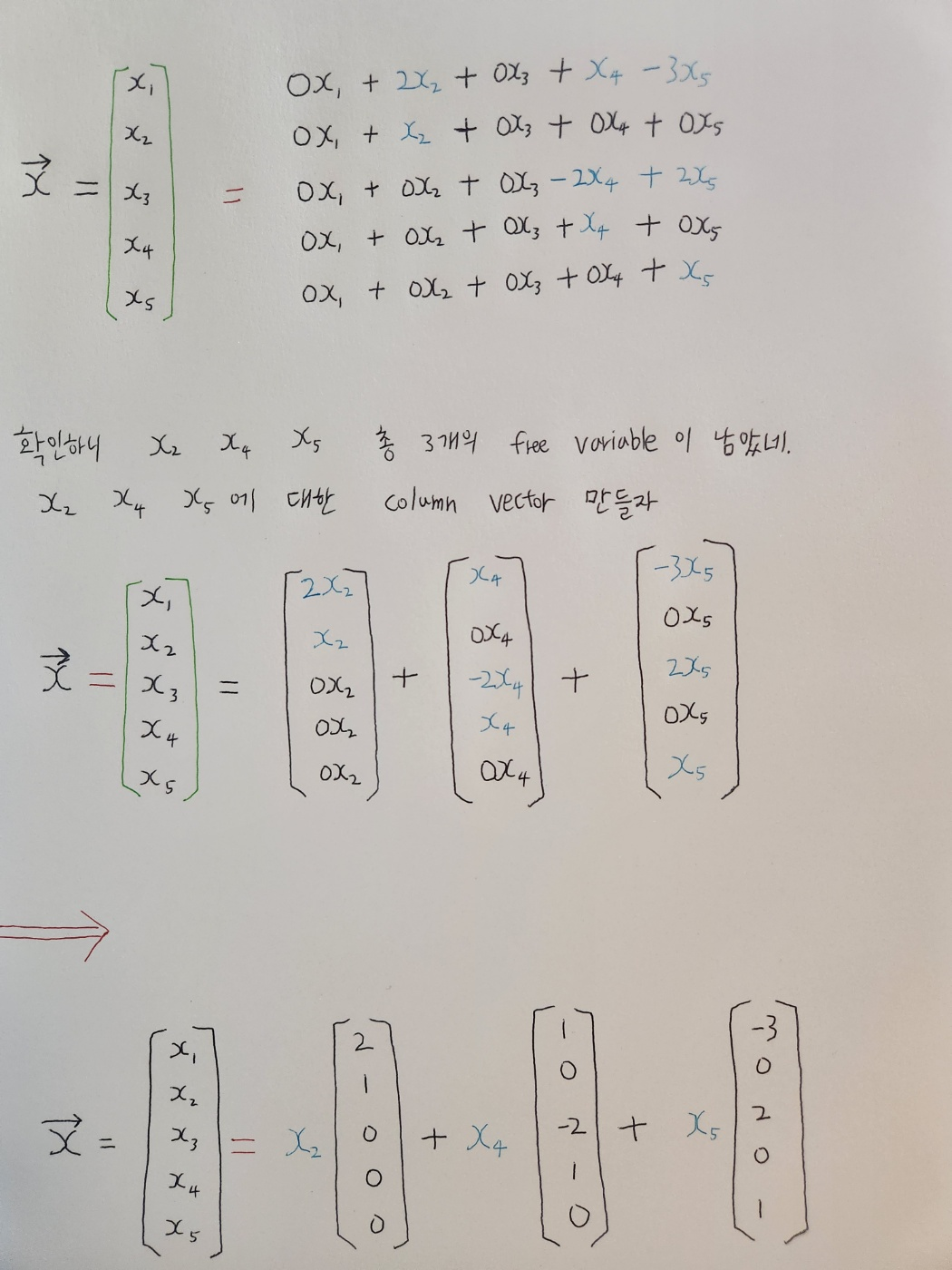
\(x_5 = t \\x_4 = s \\x_3 = -4s + t \\x_2 = s-3t \\x_1 = -2s -2t\)
\(\begin{pmatrix} x_1 \\ x_2 \\x_3 \\x_4 \\x_5\end{pmatrix} =\begin{pmatrix} -2s-2t \\ s-3t \\-4s+t \\s \\t\end{pmatrix} =s\begin{pmatrix} -2 \\ 1 \\-4 \\1 \\0\end{pmatrix} +t\begin{pmatrix} -2 \\ -3 \\1 \\0 \\ 1\end{pmatrix} =s \vec{n}_s+t \vec{n}_t\)
Ux=0 의 해가 \(n_s\)와 \(n_t\)의 선형결합으로 나타나기에 \(n_s\)와 \(n_t\)는 N(U)를 생성한다
또한 {\(n_s\), \(n_t\)}는 선형독립이기에 N(U)의 basis가 된다 –> (\(n_s\)와 \(n_t\)의 마지막 두 성분을 보면 자명하다)
basis of N(U) = \(\left\{ \vec{n}_s, \vec{n}_t \right\}\)
nullity = dimN(U) = 2
참고
- gaussian elimination 수행 전 행렬: A
- 가우스 소거 후 행렬: U
⬆️임의로 위의 상황을 설정
\(R(A)=R(U)\)
기약 행 사다리꼴 U의 행벡터들 또한 A의 행벡터들의 선형 결합이라 U의 행공간 = A의 행공간
$N\left(A\right)=N\left(U\right)$
영공간의 경우 homogeneous system Ax=0과 Ux=0은 같은 해를 갖기 때문에 두 해집합은 같다.
따라서 A의 영공간 N(A)와 U의 영공간 N(U)이 같음은 자명하다.
\(C(A)≠C(U)\)
C(A)의 basis를 구하려면 C(U)의 basis를 구하면 안되고, A의 열벡터들 중에서 선형 독립인 것만 추출해야함
5-2 dim 응용
1
2
(ง˙∇˙)ว 이벤트 문제 2
(혹시 문제가 끊어져 보이면, 휴대폰을 가로로 돌리시면 보일겁니다!)
벡터공간 \(R^4\)의 두 부분공간 V와 W를
\(V = \{(a,b,c,d) \in R^4 \quad | \quad b+c+d = 0 \},\)
\(W = \{(a,b,c,d) \in R^4 \quad | \quad a+b=0, \quad c=2d \}\)로 정의할 때
\(dim(V)\) + \(dim(W)\) + \(dim(V \cap W)\)의 값은?
————————————————————————————
먼저 V와 W의 교집합을 찾아줍시다! \(V \cap W = V = \{(a,b,c,d) \quad | \quad b+c+d = 0, \quad a+b = 0, \quad c=2d\}\)
이렇게 총 3가지네요!
[V의 기저 찾기]
이제 차원을 구하기 위해 V의 기저부터 찾아봅시다!
V를 보니 a는 혼자서 놀고 있어서 –> (1,0,0,0)
그다음에 b가 1이면 d는 당연히 -1 –> (0,1,0,-1)
그리고 c가 1이면 d는 당연히 -1 –> (0,0,1,-1)
따라서 V의 기저는 총 3개로 (1,0,0,0), (0,1,0,-1), (0,0,1,-1)
$ \color{red}{\Rightarrow} $ 즉 dim(V) = 3
[W의 기저 찾기]
W를 보니 a가 1로 고정되면 b는 당연히 -1 그리고 c,d는 따로 놀게! –> (1,-1,0,0)
그 다음에 c가 1이면 d는 당연히 \(\frac{1}{2}\) –> (0,0,1,\(\frac{1}{2}\))
따라서 W의 기저는 (1,-1,0,0), (0,0,1,\(\frac{1}{2}\))
$ \color{blue}{\Rightarrow} $ 즉 2차원이어서 기저는 총2개로 dim(W) = 2
[V\(\cap\)W의 기저 찾기]
\(V \cap W\)를 통해 a부터 정하니 복잡하네 그러면 거꾸로 c부터 정해서 보자!
c를 2로 먼저 정하면 d는 1 그럼 b는 -3이네! –> 자동으로 a는 3되네
$ \color{green}{\Rightarrow} $ (3,-3,2,1) 즉 기저는 1이라서 2개의 교집합은 1차원이네!
따라서 정답은 6
5-3 예제 5개

자료 출처
- [선형대수학] 3강. 수학적 벡터 (벡터공간)
- 혁펜하임 [선대] 2-6강. span 과 column space (열공간) 직관적 설명
- 3Blue1Brown 선형 조합, 범위 및 기저 벡터 2장 선형대수학의 본질
- Wrath of Math Linear Transformations of a Vector (with standard matrix)
- [장황수학], 벡터공간 및 부분공간
- 기저 (선형대수학)
- R, Python 분석과 프로그래밍의 친구 (by R Friend):티스토리
- [수학채널 쑤튜브] 선형대수학 24강: 선형결합(linear combination)과 생성(span)
- desmos
- [장황수학] 랭크1
- [장황수학] 랭크의 활용
- [Wrath of Math] Find Null Space and Nullity of a Matrix - Linear Algebra
- [프린키피아] 행공간, 열공간, 영공간(Row, Column and Null
- [공돌이의 수학정리노트] 행렬과 선형변환

