ProjectionMatrix & LSM
🙅♂️휴대폰으로 볼 때 혹시 글자나 숫자가 화면에 다 안나오면, 휴대폰 가로로 돌리시면 됩니다
목차
1
2
3
4
5
6
1. PreRequisites
2. 문제 상황
3. 😵💫어떡하지?
4. 에니메이션
5. 이제 Least Squares을 어떻게 쓰지?
6. 참고
1. PreRequisites
2. 문제 상황
\(A_{10\cdot3}\) 행렬이 있고 \(R^{10}\)에서 3차원을 span하는 C(A) aka 열공간A가 있다고 하자
여기서 \(R^{10}\)에 있는 \(\vec{b}\)가 어떻게 해야 C(A)와 최소 거리를 가질까?
(3차원 열공간A가 아래처럼 평면으로 그려져도 진짜 평면은 아니다.) → 그냥 쉽게 쉽게 그렸다
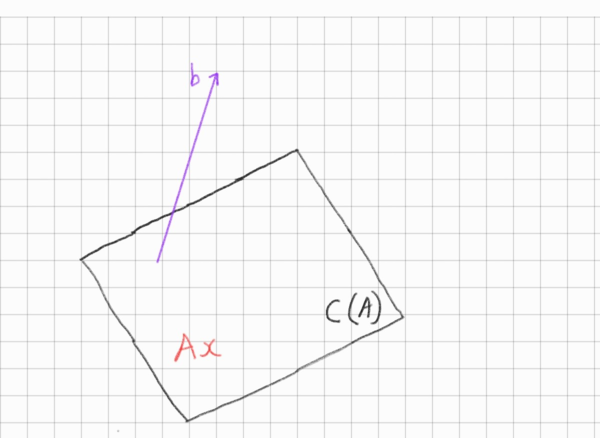
참! 여기서 \(Ax \neq b\)다 왜냐하면 \(\vec{b}\)가 A가 span하는 공간 내부에 없고 다른데 있기 때문
(열공간밖에 있어서)
\(\Rightarrow\) \(A \vec{x}\)로는 \(\vec{x}\)를 아무리 바꿔봤자 \(\color{red}{\neq}\) \(b\) 다
3. 😵💫어떡하지?
\(\color{red}\therefore\)그러면 최대한 \(\vec{b}\)랑 가깝게 만드는 $x$라도 찾아보자
\(\Rightarrow\) Least Square Matrix 적용 가능한 문제 상황
일단 아래에서는 최소거리를 나타내기 위해 어떤 벡터가 나을지 탐색해보자
어떤 \(Ax\)벡터가 \(\vec{b}\)랑 가까울까?
4. 에니메이션

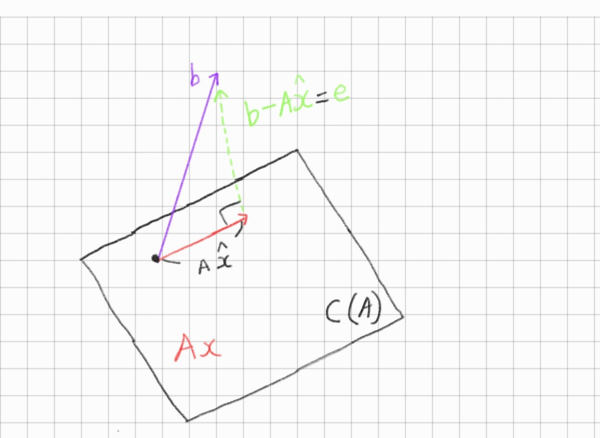
\(A \vec{x}\)가 span공간상에서 탐험하다가 \(\vec{b}\)와 길이가 가장 짧은 그순간의 \(\vec{x}\)가 우리가 찾고자 하는 값이다
그때 찾게될 \(\vec{b}\)와의 최소거리 벡터를 \(A\hat x\)라고 하겠다
그때의 높이를 \(\vec{b}-A \hat x\)라 나타내고 이를 error벡터인 \(\vec{e}\)로 나타내겠다
\(\Rightarrow\)즉 \(\vec{e}\)가 가장 작아지도록하는 \(x\)를 찾아야한다
최종적으로는 Least Square vector로 보면 \(||\vec{e}_{2}||^{2}\) 즉 (\({Norm_2}^2\))을 줄여야 한다
이를 나타내면 아래 사진과 같다 ($\perp$이야기는 아래에서 하겠다)
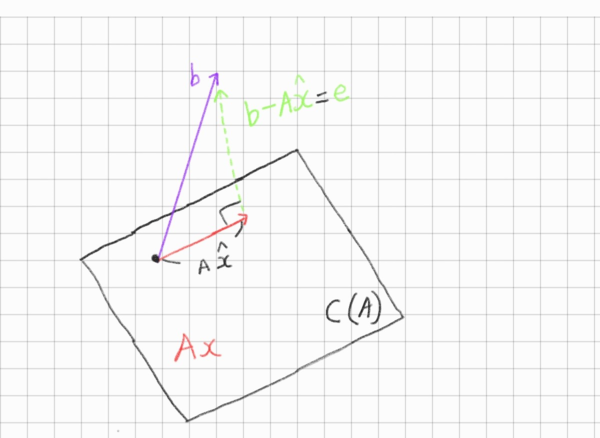
최소제곱법(LSM)을 구하기 위해 수선의 발을 내리자
\(\color{pink}\Rightarrow\) \(\vec{b}\)랑 제일 거리가 가까운 벡터인 \(A{\hat{x}}\)와 \(\vec{e}\)가 \(\perp\)여야 한다.
😎참고! → \(A\)가 정방행렬이면 \(A^{T}\)의 Rank랑 서로 같다
게다가 \(A A^T({A A^T})^{-1} = I\)
아무튼 이어서 \(\left( b-A \hat{x} \right)^TA\hat x = 0\)
( \(b^TA-\hat x^T A^T A\) ) \(\hat x = 0\)
노란 괄호 안이 0이 되야 한다
( \(b^TA = \hat x^T A^T A\) ) 여기서 한번더 \(T\)(전치)를 해주면 아래와 같이 된다
\(A^T b = A^T A \hat x\) 이것을 normal equation이라고 한다
자 이것에 대해 양변에 \(({A^T A})^{-1}\)을 곱하자
\(\Rightarrow\) \(({A^T A})^{-1} A^T b = \hat x\)
우리는 이렇게 \(\hat{x}\)을 구했으니 \(A \hat{x}\)에 대입해보자
\(A \hat{x}\) = [ \(A({A^T A})^{-1} A^T\) ] \(b\)
여기서 [괄호 안]이 projection matrix가 된다
5. 이제 Least Squares을 어떻게 쓰지?
위를 보면 알 수 있듯이 \(\vec{x}\)는 바로 얻을 수 없는 대신 아래와 같은 형태로
우리에게 noise를 더해 \(\vec{z}\)로 전달된다
(A라는 행렬도 통과하고 noise도 더해 우리에게 온다는 말이다)
\(\vec{z}\)는 우리가 측정한 것이니 measurement라고 한다
\(z = Ax+n\)
\(\therefore\) measurement를 보고 \(x\)를 알아내야한다
이를 그림으로 나타내면 아래와 같다
그림을 보고 알 수 있는 것은 \(z\)랑 가깝게 만드는 \(x\)를 찾자는거다
위의 내용들을 보면 알 수 있듯이 \(e\)랑 \(A \hat x\)가 \(\perp\)할때니까
내적을 했을 때 0이 되야한다(직각이니까)
\(A \hat x\) \(\color{red}\cdot\) \(e\) = 0

